

Voor de allereerste keer zwommen draadloze millirobots door een smal bloedvat, zowel met de stroming van het bloed mee als er tegenin. Met behulp van een robotisch gestuurde roterende magneet stuurden onderzoekers van de Universiteit Twente en het Radboudumc schroefvormige robotjes door een losgemaakte aorta met nieren. Met behulp van een robot gestuurde, draaiende magneet stuurden ze de robotjes door de slagaders. De onderzoekers ontvingen recent een subsidie van Health Holland om de technologie verder te ontwikkelen voor het verwijderen van bloedproppen.
Bij dit onderzoek hoort een video waarop het experiment zichtbaar is met een toelichting van de onderzoeker: https://utwente.yuja.com/V/Video?v=610037&node=2982463&a=579851665
Elk jaar sterft wereldwijd één op de vier mensen aan aandoeningen die worden veroorzaakt door bloedstolsels. Een bloedstolsel blokkeert een bloedvat waardoor het bloed geen zuurstof meer kan leveren aan bepaalde delen van het lichaam. Chirurgen gebruiken nu nog flexibele instrumenten om de bloedprop te verwijderen en het bloed weer te laten stromen, maar sommige delen van het lichaam zijn moeilijk te bereiken. Met hun kleine formaat kunnen de kleine robots deze plekken wel bereiken.
De onderzoekers toonden aan dat deze millirobots door bloedvaten kunnen reizen. Om dat te doen moesten de onderzoekers een aantal uitdagingen overwinnen. De millirobots moeten krachtig genoeg zijn om door de bloedstroom te komen, en ze moeten zowel tegen de stroom in als met de stroom mee kunnen zwemmen. Ook moeten ze heel nauwkeurig bestuurd en gelokaliseerd worden. Om de bloedvaten niet te beschadigen moet ze biocompatibel zijn.
Voor hun experiment in het Technisch Medisch Centrum van de Universiteit Twente gebruikten de onderzoekers een echte aorta en nieren. “Dit vereiste een interdisciplinaire aanpak en samenwerking tussen veel verschillende afdelingen: Het Robotics Lab, Laboratory of biointerface, blood lab, DesignLab, LipoCoat en MESA+ hebben ons allemaal geholpen om tot dit resultaat te komen”, vertelt onderzoeker Islam Khalil.
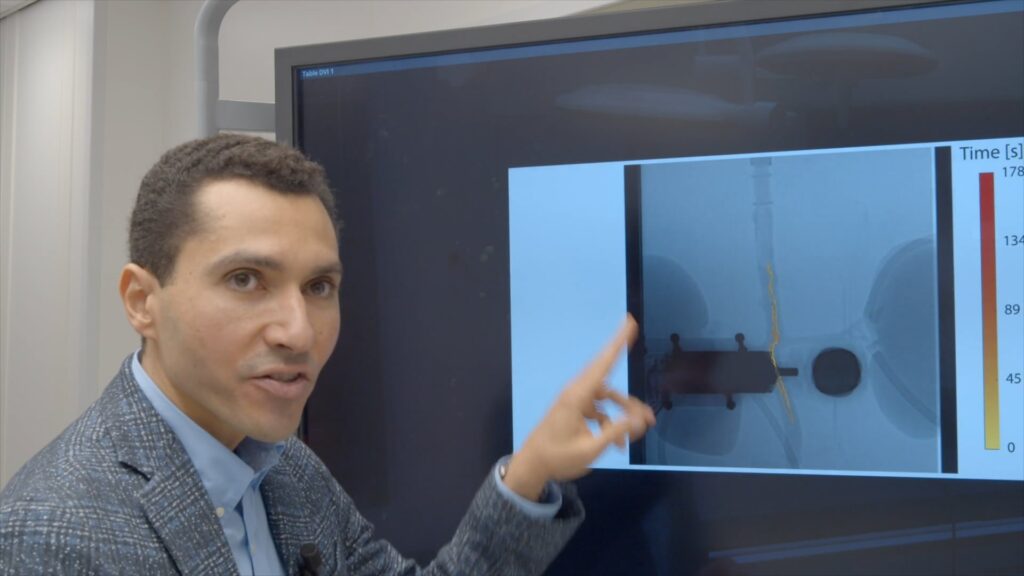
Voor het experiment gebruikten de onderzoekers een draaiende magneet bestuurd door een robotarm om de millirobots draadloos door het bloedvat te sturen. Met een röntgenapparaat lokaliseerden ze de millirobots terwijl deze door de aorta zwom. De onderzoekers gebruikten een maximale bloedstroom in de aorta van 120 ml per minuut. Maar met een sterkere magneet kunnen de millirobots door een sterkre stroming zwemmen. De millirobots zwommen stabiele rechte stukken met de stroom mee en tegen de stroom in. Dat lukte met één, maar ook met meerdere robots tegelijk.
De robots zelf zijn 3D-geprinte, schroefvormige objecten met een kleine permanente magneet erin. “Deze kleine magneet van slechts een millimeter lang en een millimeter in diameter plaatsten we zo dat hij de ‘schroef’ in beide richtingen kan draaien. Dit maakt het mogelijk om tegen de stroom in te zwemmen en vervolgens om te draaien en terug te zwemmen”, legt Khalil uit. Het kleine formaat maakt het mogelijk om meerdere robots tegelijk te gebruiken. En de schroefvorm maakt het mogelijk om door een bloedstolsel heen te boren.

Link magazine oktober/november 2023. Thema circulair ondernemen: meer toegevoegde waard, kleiner footprint? Lees Link magazine digitaal of vraag een exemplaar op bij mireille.vanginkel@linkmagazine.nl
“Deze millirobots hebben een enorme potentie in de vaatchirurgie”, zegt Michiel Warle, vaatchirurg in het Radboudumc. “Momenteel gebruiken we bloedverdunners en flexibele instrumenten, maar een millirobot kan naar moeilijk bereikbare slagaders zwemmen. Daarvoor zijn slechts minimale incisies nodig om ze in te brengen.” In een nieuwe samenwerking met Radboudumc en Triticum Medical (Israël) gaan de onderzoekers de millirobots verder ontwikkelen zodat ze draadloos bloedstolsels kunnen verwijderen. Het consortium onderzoekt manieren om deze technologie te exploiteren en zo de gezamenlijke groei in medische robotica en technische geneeskunde te versterken.
Naast het verwijderen van bloedstolsels zijn ook nog andere toepassingen denkbaar. “De robots kunnen medicijnen afleveren op zeer specifieke plaatsen in het lichaam waar het medicijn het meest nodig is. Op die manier hebben we minimale bijwerkingen in de rest van het lichaam”, legt Khalil uit.
Kracht door samenwerking
Dit onderzoek is een samenwerking tussen Radboudumc en de Universiteit Twente. Het is gefinancierd vanuit het TURBO-programma (Twente University RadBoudumc Opportunities). Met het TURBO-programma kunnen onderzoeksgroepen van beide instellingen een innovatief idee uitbouwen tot een groot onderzoeksproject. De onderzoekers verlengden hun samenwerking met Triticum Medical (Israël) om de millirobots verder te ontwikkelen. Onlangs ontvingen zij van Health Holland een TKI-LSH (Topconsortia voor Kennis & Innovatie – Life Science & Health) subsidie voor publiek-private samenwerking.
Dr. Islam Khalil is universitair docent bij de afdeling Biomechanical Engineering (BE; Faculteit ET / TechMed Centrum). Zijn onderzoeksinteresse gaat onder andere uit naar het modelleren en ontwerpen van bewegingscontrolesystemen voor zachte microrobots, biologisch geïnspireerde microrobots, mechatronisch systeemontwerp en draadloze magnetische micro/nanorobotica met toepassingen op micro/nanomanipulatie, micro-assemblage en gerichte medicijnafgifte.



{kind=link}